
Au cœur de l'« école des robots » : comment la Chine utilise la VR pour enseigner aux humanoïdes l'art des tâches quotidiennes
Dans un laboratoire brillamment éclairé à Wuhan, l'avenir du travail domestique s'écrit — non pas à travers des lignes de code, mais à travers les mouvements fluides d'enseignants humains. Cette installation, souvent décrite comme une « école de robots », représente un changement dans notre approche de l'intelligence artificielle. Au lieu d'essayer de programmer manuellement chaque rotation d'articulation et chaque calcul de couple, les ingénieurs utilisent la réalité virtuelle (VR) pour montrer aux robots comment vivre dans un monde humain.
Au début de l'année 2026, la course au robot humanoïde polyvalent est passée de la phase « peut-il marcher ? » à la phase « peut-il être utile ? ». L'approche de la Chine à Wuhan se concentre sur cette dernière, en utilisant une méthode connue sous le nom d'apprentissage par imitation pour combler le fossé entre le potentiel mécanique et l'utilité pratique.
La salle de classe virtuelle : comment fonctionne la téléopération
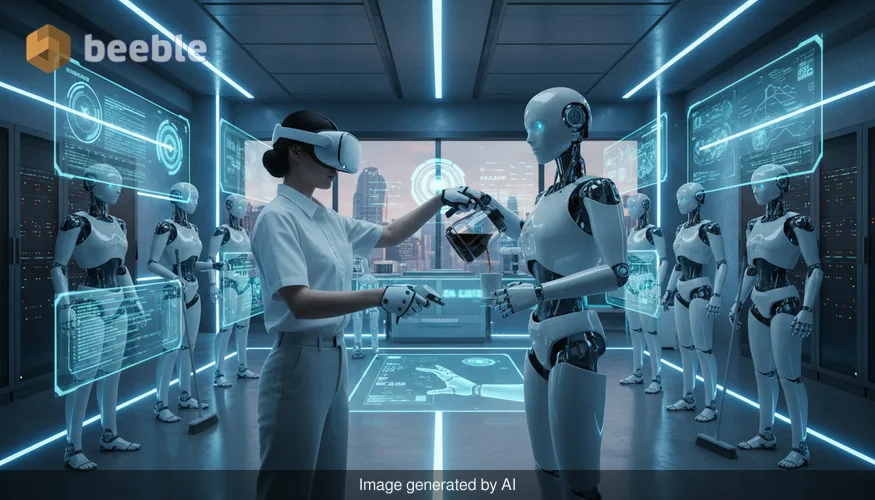
Le processus commence par un formateur humain, tel que Qu Qiongbin, revêtant un casque VR et saisissant une paire de contrôleurs de mouvement. À travers le casque, le formateur voit exactement ce que le robot voit. Lorsque le formateur déplace ses bras pour attraper une tasse de café ou plier une chemise, le robot humanoïde qui se tient à l'autre bout de la pièce imite ces mouvements en temps réel.
C'est bien plus qu'un simple contrôle à distance ; il s'agit d'une mission sophistiquée de collecte de données. Chaque nuance du mouvement humain — l'accélération du poignet, la pression appliquée par les doigts et la correction d'un léger glissement — est enregistrée.
« Nos mains gauche et droite sont comme les bras gauche et droit du robot », explique Qu Qiongbin. « Il apprendra nos postures en les déplaçant. Les données seront téléchargées sur le cloud. Une fois les données approuvées, elles seront téléchargées sur le robot, qui apprendra d'elles. »
Du mimétisme à l'autonomie
L'objectif n'est pas d'avoir un humain contrôlant le robot indéfiniment. La magie opère dans la phase « cloud » mentionnée par les formateurs. Une fois que des milliers d'heures de données téléopérées sont collectées, elles sont injectées dans des réseaux neuronaux. Cela permet au robot de passer du simple mimétisme à l'exécution autonome.
En observant différents formateurs effectuer la même tâche dans divers environnements, l'IA du robot apprend à généraliser. Elle comprend qu'une « tasse » peut être en céramique ou en plastique, et qu'elle peut se trouver sur une table ou sur un comptoir de cuisine. Cette approche riche en données est ce qui permet à ces machines de passer du laboratoire au monde réel, où les conditions sont rarement parfaites.
L'essor du formateur de robots IA
Cette nouvelle industrie a donné naissance à une profession unique : le formateur de robots IA. Ces individus sont à la fois chorégraphes, scientifiques des données et éducateurs. Le lien émotionnel entre le formateur et la machine est étonnamment fort.
Qu Qiongbin décrit le sentiment d'accomplissement comme étant semblable à celui de voir un enfant grandir. Cette méthode d'enseignement centrée sur l'humain est vitale car les environnements humains sont conçus pour des corps humains. En demandant à des humains de « piloter » les robots dans ces espaces, les ingénieurs s'assurent que les robots apprennent les moyens les plus efficaces et les plus sûrs de naviguer dans nos maisons et nos lieux de travail.
Pourquoi cela compte en 2026
La Chine s'est fixé des objectifs ambitieux pour produire en masse des robots humanoïdes d'ici 2027, les considérant comme une solution à une main-d'œuvre en déclin et à une population vieillissante. L'« école de robots » de Wuhan est une pièce maîtresse de ce puzzle. Alors que des entreprises occidentales comme Tesla et Figure AI poursuivent des voies similaires, l'ampleur de la collecte de données dans les laboratoires chinois offre un avantage concurrentiel en termes de vitesse de formation.
| Caractéristique | Robotique traditionnelle | Apprentissage par imitation (École des robots) |
|---|---|---|
| Programmation | Manuel, code basé sur des règles | Basé sur les données, réseaux neuronaux |
| Adaptabilité | Faible ; difficulté avec les nouveaux objets | Élevée ; apprend par l'expérience |
| Méthode de formation | Modélisation mathématique | Téléopération VR et observation |
| Utilisation principale | Ateliers d'usine structurés | Environnements domestiques/bureaux non structurés |
| Vitesse de déploiement | Lente pour les tâches complexes | Rapide, une fois l'ensemble de données établi |
Retombées pratiques : ce que cela signifie pour l'avenir
À mesure que ces technologies passent du laboratoire au marché de la consommation, voici ce à quoi nous pouvons nous attendre dans les années à venir :
- L'« App Store » des compétences : Tout comme on télécharge une application, les futurs propriétaires de robots pourraient télécharger des « ensembles de compétences » (par exemple, « Nettoyage en profondeur » ou « Mode Barista ») formés par des formateurs professionnels dans des installations comme celle de Wuhan.
- Coûts matériels réduits : À mesure que le logiciel (le « cerveau ») devient plus efficace pour traiter les données, les exigences matérielles des robots pourraient se stabiliser, les rendant plus abordables pour les ménages de la classe moyenne.
- Nouveaux parcours de carrière : Le rôle de « l'étiqueteur de données » évolue vers celui de « formateur d'IA physique », un emploi qui requiert une coordination physique et une compréhension de la logique spatiale plutôt qu'un diplôme en informatique.
Perspectives d'avenir
La vue d'un robot apprenant à faire du café via un casque VR peut sembler relever de la science-fiction, mais c'est la réalité actuelle de l'industrie de la robotique. En traitant les robots comme des étudiants plutôt que comme des outils, les chercheurs débloquent un niveau de dextérité et de bon sens que l'on pensait auparavant impossible. Les « diplômés » de l'école de robots de Wuhan pourraient bientôt être ceux qui nous aident dans nos corvées quotidiennes, prouvant que la meilleure façon de construire une personne artificielle est de laisser une personne réelle lui montrer la voie.


On se retrouve de l'autre côté.
Notre solution de messagerie cryptée de bout en bout et de stockage en nuage constitue le moyen le plus puissant d'échanger des données en toute sécurité, garantissant ainsi la sûreté et la confidentialité de vos données.
/ Créer un compte gratuit
