
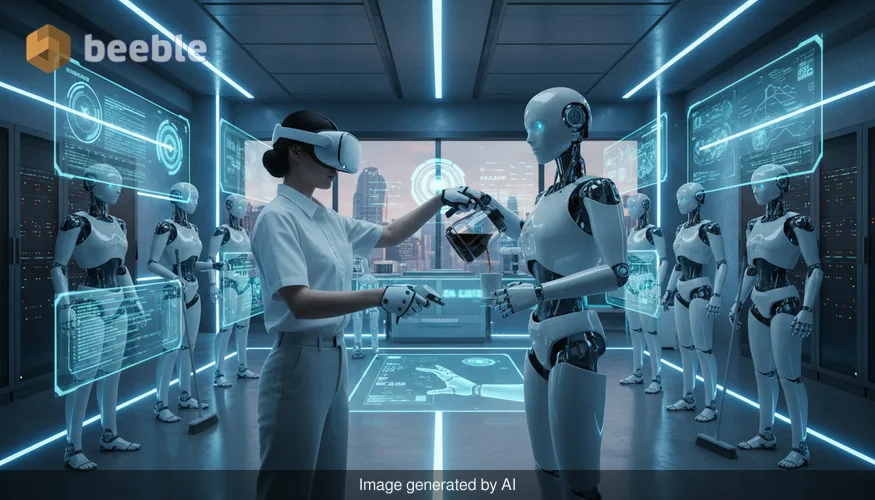
在武汉一个灯火通明的实验室里,家务劳动的未来正在被书写——不是通过代码行,而是通过人类导师流畅的动作。这个通常被称为“机器人学校”的设施,代表了我们处理人工智能方式的一个转变。工程师们不再尝试手动编程每个关节的旋转和扭矩计算,而是利用虚拟现实(VR)向机器人展示如何在人类世界中生活。
截至2026年初,通用人形机器人的竞赛已从“它能走路吗?”阶段转向“它有用吗?”阶段。中国在武汉采取的方法侧重于后者,利用一种被称为模仿学习的方法来弥补机械潜力与实际效用之间的差距。
虚拟课堂:远程操作的工作原理
这个过程始于一位人类教练,例如屈邛斌(Qu Qiongbin),他戴上VR头显并握住一对动作控制器。通过头显,教练能实时看到机器人所看到的一切。当教练移动手臂去拿咖啡杯或折叠衬衫时,站在房间另一端的人形机器人会实时模仿这些动作。
这不仅仅是远程控制,而是一项复杂的数据采集任务。人类动作的每一个细微差别——手腕的加速度、手指施加的压力,以及对轻微滑动的修正——都会被记录下来。
“我们的左右手就像机器人的左右臂,”屈邛斌解释道。“它通过模仿我们的动作来学习姿势。数据将上传到云端。一旦数据获得批准,就会上传到机器人身上,它将从中学习。”
从模仿到自主
目标并非让步人类永远控制机器人。神奇之处发生在教练提到的“云端”阶段。一旦收集到数千小时的远程操作数据,这些数据就会被输入神经网络。这使得机器人能够从简单的模仿转向自主执行。
通过观察不同的教练在各种环境中执行相同的任务,机器人的AI学会了泛化。它理解“杯子”可能是陶瓷的也可能是塑料的,它可能在桌子上也可能在厨房柜台上。这种数据密集型的方法正是让这些机器能够从实验室走向现实世界的关键,因为现实世界的条件很少是完美的。
AI机器人教练的兴起
这个新行业催生了一个独特的职业:AI机器人教练。这些人既是编舞师,又是数据科学家,还是教育者。教练与机器之间的情感联系出人意料地强烈。
屈邛斌将这种成就感描述为类似于看着孩子长大。这种以人为中心的教学方法至关重要,因为人类环境是为人类身体设计的。通过让人类在这些空间中“驾驶”机器人,工程师可以确保机器人学会导航我们的家庭和工作场所最有效、最安全的方式。
为什么这在2026年很重要
中国设定了到2027年大规模生产人形机器人的宏伟目标,将其视为解决劳动力萎缩和人口老龄化的方案。武汉的“机器人学校”是这一拼图中的关键一环。虽然特斯拉(Tesla)和Figure AI等西方公司也在追求类似的路径,但中国实验室庞大的数据采集规模在训练速度上提供了竞争优势。
| 功能 | 传统机器人技术 | 模仿学习(机器人学校) |
|---|---|---|
| 编程方式 | 手动、基于规则的代码 | 数据驱动、神经网络 |
| 适应能力 | 低;难以处理新物体 | 高;通过经验学习 |
| 训练方法 | 数学建模 | VR远程操作与观察 |
| 主要用途 | 结构化的工厂车间 | 非结构化的家庭/办公环境 |
| 部署速度 | 复杂任务部署缓慢 | 一旦建立数据集,部署迅速 |
实际启示:这对未来意味着什么
随着这些技术从实验室走向消费市场,我们可以期待未来几年出现以下情况:
- 技能“应用商店”: 就像下载应用程序一样,未来的机器人主人可能会下载由武汉这类设施的专业教练训练的“技能集”(例如“深度清洁”或“咖啡师模式”)。
- 硬件成本降低: 随着软件(“大脑”)处理数据的效率提高,机器人的硬件要求可能会趋于稳定,使中产阶级家庭更能负担得起。
- 新的职业路径: “数据标注员”的角色正在演变为“物理AI教练”,这份工作需要肢体协调能力和对空间逻辑的理解,而不是计算机科学学位。
展望未来
看到机器人通过VR头显学习冲咖啡可能看起来像科幻小说,但这正是机器人行业的现状。通过像对待学生而不是工具一样对待机器人,研究人员正在解锁以前被认为不可能的灵巧程度和常识。武汉机器人学校的“毕业生”可能很快就会成为帮我们做日常家务的人,这证明了建造人造人的最佳方式是让真人为其指路。