
„Robotikooli“ sisevaade: kuidas Hiina kasutab VR-i, et õpetada humanoididele igapäevaste kodutööde kunsti
Wuhani eredalt valgustatud laboris kirjutatakse kodutööde tulevikku – mitte koodiridade, vaid inimõpetajate sujuvate liigutuste kaudu. Seda asutust, mida sageli kirjeldatakse kui „robotikooli“, tähistab nihet selles, kuidas me tehisintellektile läheneme. Selle asemel, et proovida iga liigese pööret ja pöördemomendi arvutust käsitsi programmeerida, kasutavad insenerid virtuaalreaalsust (VR), et näidata robotitele, kuidas elada inimeste maailmas.
- aasta alguse seisuga on võidujooks universaalse humanoidroboti nimel liikunud faasist „kas see suudab kõndida?“ faasi „kas see on kasulik?“. Hiina lähenemine Wuhanis keskendub viimasele, kasutades meetodit, mida tuntakse kui imiteerivat õppimist (imitation learning), et ületada lõhe mehaanilise potentsiaali ja praktilise kasulikkuse vahel.
Virtuaalne klassiruum: kuidas teleoperatsioon toimib
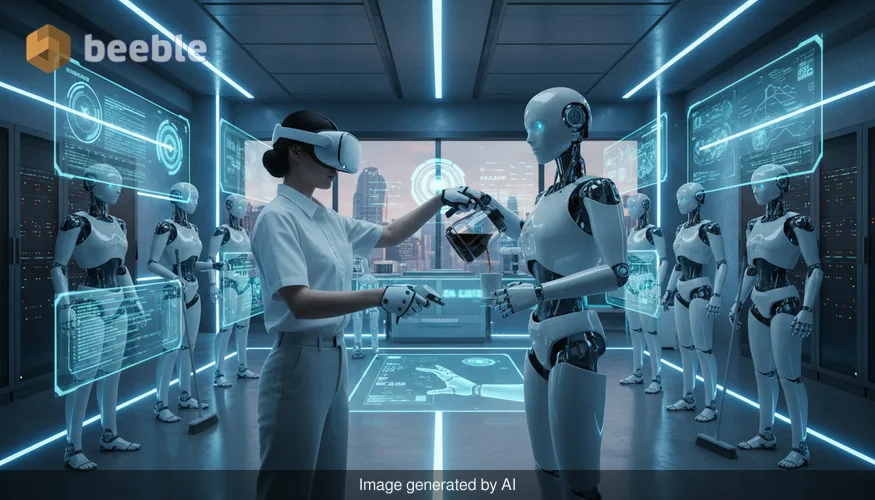
Protsess algab inimtreeneriga, nagu Qu Qiongbin, kes paneb pähe VR-peakomplekti ja haarab paari liikumiskontrollereid. Peakomplekti kaudu näeb treener täpselt seda, mida robot näeb. Kui treener liigutab oma käsi, et haarata kohvitass või voltida särki, imiteerib teises toas seisev humanoidrobot neid liigutusi reaalajas.
See on midagi enamat kui lihtsalt kaugjuhtimine; see on keerukas andmete kogumise missioon. Salvestatakse iga inimliku liikumise nüanss – randme kiirendus, sõrmedega rakendatav surve ja kerge libisemise korrigeerimine.
„Meie vasak ja parem käsi on nagu roboti vasak ja parem käsi,“ selgitab Qu Qiongbin. „See õpib meie poose neid liigutades. Andmed laaditakse pilve. Kui andmed on heaks kiidetud, laaditakse need robotisse ja see õpib neist.“
Matkimisest autonoomiani
Eesmärk ei ole see, et inimene kontrolliks robotit igavesti. Maagia toimub treenerite mainitud „pilve“ faasis. Kui tuhandeid tunde teleopereeritud andmeid on kogutud, sisestatakse need närvivõrkudesse. See võimaldab robotil liikuda lihtsalt matkimiselt autonoomse täitmiseni.
Vaadeldes erinevaid treenereid sooritamas sama ülesannet erinevates keskkondades, õpib roboti tehisintellekt üldistama. See mõistab, et „tass“ võib olla keraamiline või plastikust ning see võib asuda laual või köögiletil. See andmemahukas lähenemine ongi see, mis võimaldab neil masinatel laboris „lõpetada“ ja siirduda pärismaailma, kus tingimused on harva täiuslikud.
Tehisintellekti robotitreeneri esiletõus
See uus tööstusharu on sünnitanud ainulaadse elukutse: AI-robotitreener. Need isikud on osalt koreograafid, osalt andmeteadlased ja osalt õpetajad. Emotsionaalne side treeneri ja masina vahel on üllatavalt tugev.
Qu Qiongbin kirjeldab saavutustunnet kui sarnast lapse üleskasvamise jälgimisele. See inimkeskne õpetamismeetod on elutähtis, sest inimkeskkonnad on loodud inimkehade jaoks. Lastes inimestel roboteid läbi nende ruumide „juhtida“, tagavad insenerid, et robotid õpivad kõige tõhusamaid ja ohutumaid viise meie kodudes ja töökohtadel navigeerimiseks.
Miks see on oluline aastal 2026
Hiina on seadnud ambitsioonikad eesmärgid humanoidrobotite masstootmiseks 2027. aastaks, nähes neis lahendust kahanevale tööjõule ja vananevale elanikkonnale. Wuhani „robotikool“ on selle pusle kriitiline osa. Kuigi lääne ettevõtted nagu Tesla ja Figure AI liiguvad sarnastel radadel, annab Hiina laborite andmekogumise tohutu ulatus neile konkurentsieelise treenimise kiiruses.
| Funktsioon | Traditsiooniline robootika | Imiteeriv õppimine (Robotikool) |
|---|---|---|
| Programmeerimine | Käsitsi, reeglipõhine kood | Andmepõhine, närvivõrgud |
| Kohanemisvõime | Madal; raskused uute objektidega | Kõrge; õpib kogemuse kaudu |
| Treeningmeetod | Matemaatiline modelleerimine | VR-teleoperatsioon ja vaatlus |
| Peamine kasutusala | Struktureeritud tehasepõrandad | Struktureerimata kodu-/kontorikeskkonnad |
| Kasutuselevõtu kiirus | Aeglane keeruliste ülesannete puhul | Kiire, kui andmestik on loodud |
Praktilised järeldused: mida see tähendab tuleviku jaoks
Kuna need tehnoloogiad liiguvad laborist tarbijaturule, on järgmistel aastatel oodata järgmist:
- Oskuste „App Store“: Sarnaselt rakenduse allalaadimisele võivad tulevased robotiomanikud alla laadida „oskuste komplekte“ (nt „Süvapuhastus“ või „Barista-režiim“), mille on välja õpetanud professionaalsed treenerid sellistes asutustes nagu Wuhani oma.
- Madalamad riistvarakulud: Kuna tarkvara (nn „aju“) muutub andmete töötlemisel tõhusamaks, võivad robotite riistvaranõuded stabiliseeruda, muutes need keskklassi majapidamistele taskukohasemaks.
- Uued karjäärivõimalused: „Andmete sildistaja“ roll on kujunemas „füüsiliseks AI-treeneriks“ – tööks, mis nõuab pigem füüsilist koordinatsiooni ja ruumiloogika mõistmist kui arvutiteaduse kraadi.
Vaade tulevikku
Pilt robotist, kes õpib VR-peakomplekti kaudu kohvi tegema, võib tunduda ulmena, kuid see on robootikatööstuse praegune tegelikkus. Koheldes roboteid pigem õpilaste kui tööriistadena, avavad teadlased osavuse ja tervisliku mõistuse taseme, mida varem peeti võimatuks. Wuhani robotikooli „lõpetajad“ võivad peagi olla need, kes aitavad meid igapäevaste toimetustega, tõestades, et parim viis tehisinimese ehitamiseks on lasta päris inimesel talle teed näidata.


Kohtumiseni teisel poolel.
Meie läbivalt krüpteeritud e-posti ja pilvesalvestuse lahendus pakub kõige võimsamaid vahendeid turvaliseks andmevahetuseks, tagades teie andmete turvalisuse ja privaatsuse.
/ Tasuta konto loomin
